
Configuration du logiciel :
- L’accès au logiciel s’effectue en allant sur le site de la classe et en suivant ce lien :
– - La première chose à faire est de modifier la langue du logiciel pour la mettre en français.
Cela s’effectue en allant sur la roue dentée située à droite, puis en choisissant ‘language’ ou ‘langue’ :

– - Parmi les rubriques situées à gauche, vous devez voir une rubrique qui s’appelle ‘Bluetooth’.
– Si c’est le cas, allez à l’étape 5.
– Si ce n’est pas le cas, allez à l’étape 4.
– - En bas de la liste des rubriques, cliquez sur ‘Extentions’ :
Cherchez l’extension qui s’appelle bluetooth et cliquez dessus pour l’installer :
– - Parmi les rubriques situées à gauche, vous devez voir une rubrique qui s’appelle ‘Servolite‘.
– Si c’est le cas, allez à l’étape 7.
– Si ce n’est pas le cas, allez à l’étape 6.
– - En bas de la liste des rubriques, cliquez sur ‘Extentions’ :
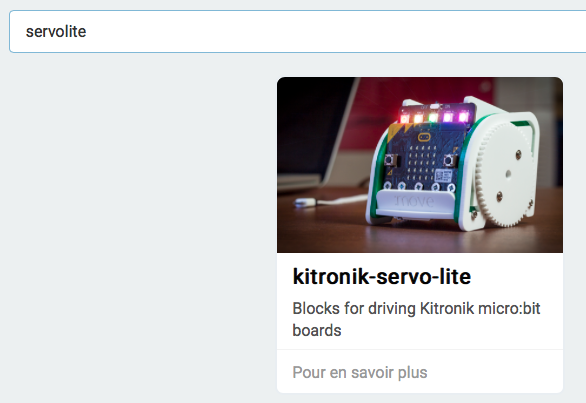
Cherchez l’extension qui s’appelle servolite et cliquez dessus pour l’installer :
– - La configuration est terminée.
–
Programmation :
- La définition du statut du micro:bit
Il est possible de réaliser des actions selon si le micro:bit est connecté ou n’est pas connecté en bluetooth.
Pour cela, il faut utiliser les blocs suivants :

– - Le pilotage par la manette virtuelle de l’application Bitty controller
Toutes les commandes effectuées par la manette virtuelle devront se trouver dans le bloc suivant (disponible dans la rubrique ‘Contrôle’) :

– - Les boutons
En utilisant des tests (Si… Alors…), il va être possible de définir quelles actions réaliser selon le bouton qui sera appuyé :
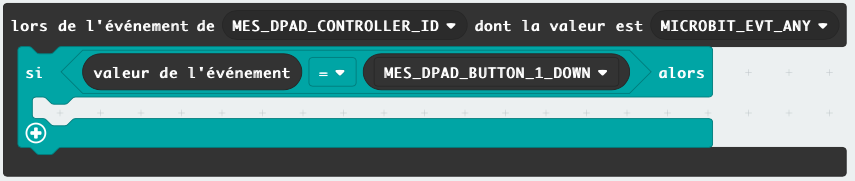
L’exemple ci-dessus permettra de définir quelle action devra être effectuée quand le bouton 1 sera appuyé.
–
Liste des boutons et actions disponibles sur la manette virtuelle :

–
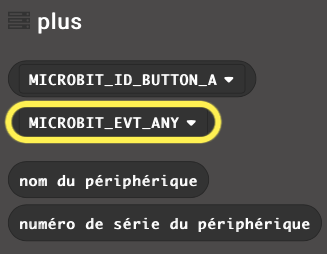
Pour trouver le bloc MES_DPAD_BUTTON_X_XXXX, il faut aller dans la rubrique ‘Contrôle’, puis dans ‘Plus’ :

Ensuite, il faut sélectionner le bloc ‘MICROBIT_EVT_ANY’ puis utiliser le petit triangle situé à droite pour faire défiler tous les boutons disponibles :
–
– - Les actions du robot
En utilisant la rubrique ‘Servolite’, il est possible de donner des ordres au robot :
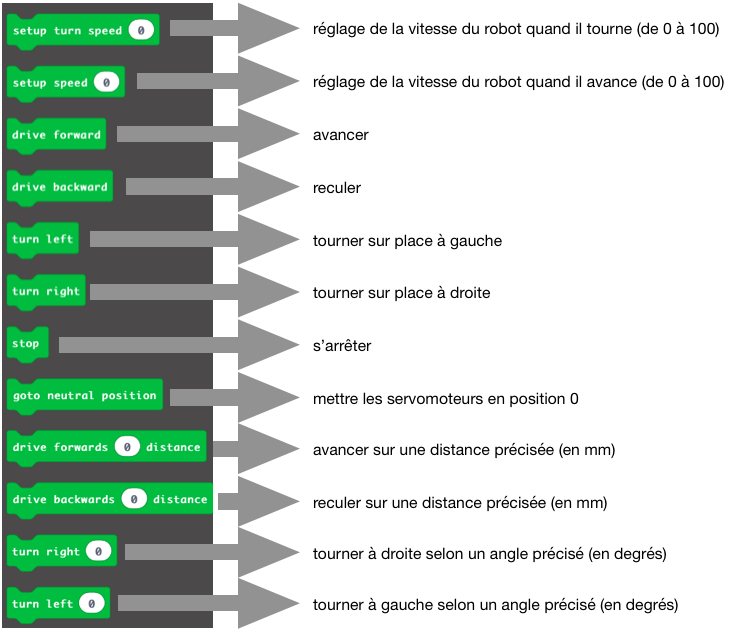
L